Hello, my name is Christopher Blum.
I am a PhD researcher at the University of Manchester (UK), based in the Robotics for Extreme Environments Group. My research focus is in planning and navigation algorithms for mobile robots.
Academic Work
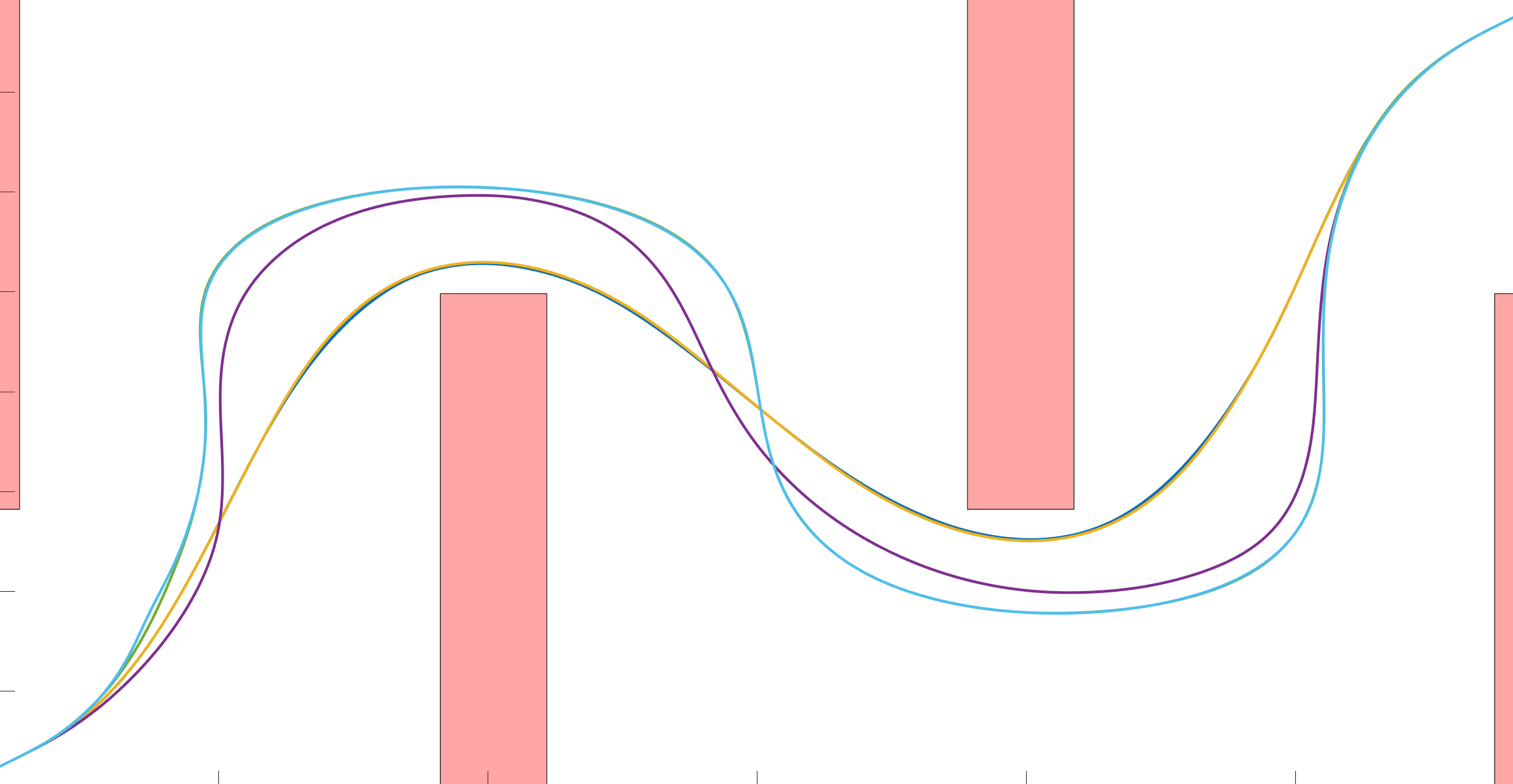
An improved trajectory optimisation algorithm for mobile robots based on a B-spline formulation of the problem.
- Improved planning efficiency by the application of B-spline constraint relaxation.
- Integration of B-spline conservatism constraints to improve performance.
- ROS simulation with CoppeliaSim
A Networked Fungal Infection Surveillance and Bio-Alarm System for Intensive Care Units.

Odometory-based flight control and navigation for a small quadrotor UAV.
- Sensor data filtering algorithms and odeometory based state estimation.
- Simulations and communication protocols facilitated by ROS.
- Controlled flight achieved for short durations.
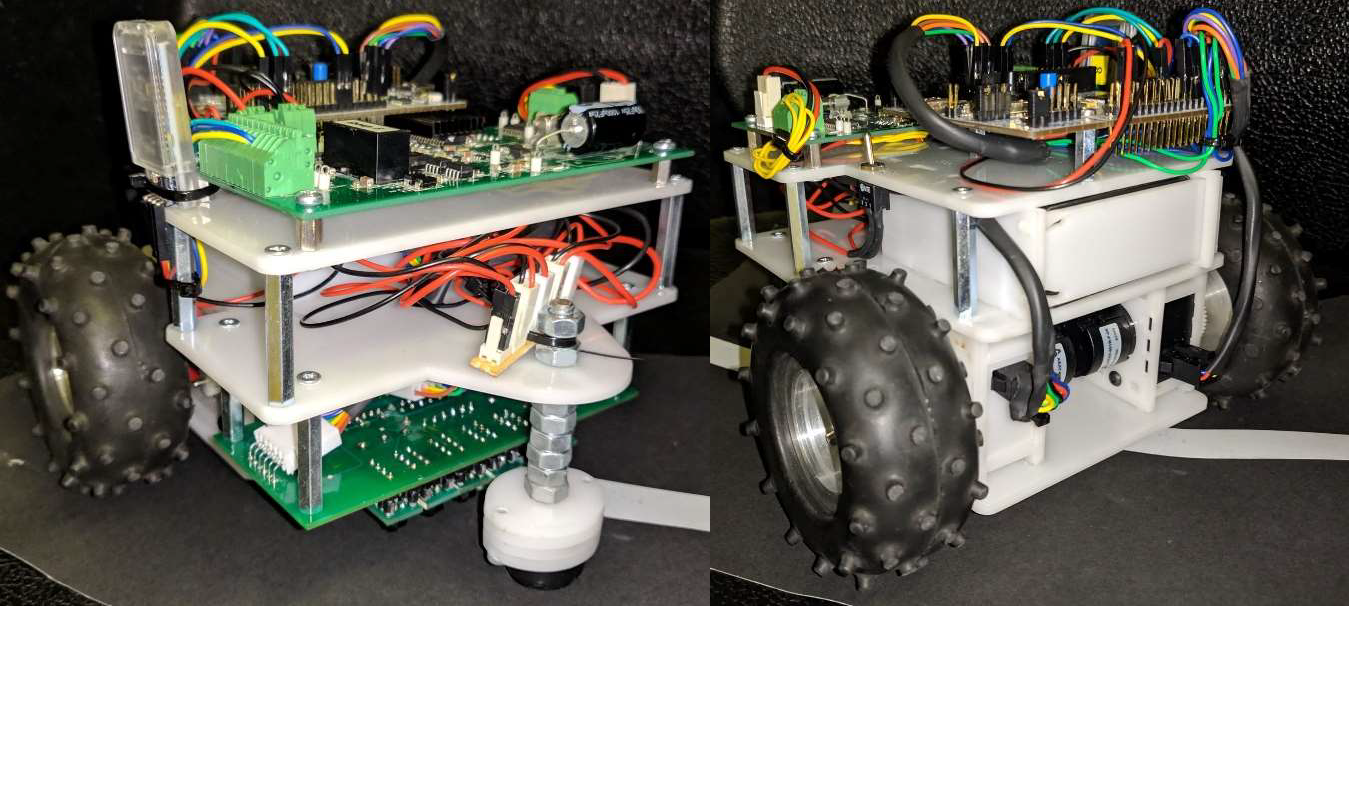
A small differential drive robot with line-following capabilities
- Custom designed compact body shell.
- Bespoke sensor array with integrated preprocessing.
- Control facilitated by on-board microcontroller with BluetoothLE-based user interaction via mobile app.
Personal Projects

A welcoming society aiming to lower the bariers to entry for hobby-level robotics.

Construction and low-level control of a 6-DOF robot arm.
- Explored 3D printing and laser cutting for fabrication.
- Developed low level control programmes for the robot actuators
- Computed and implemented analytical inverse kinematics.
Education
Manchester, UK
2017-2021
Degree: MEng Mechatronic Engineering
Class: 1st
- The Fourth Year First Prize
- The Fourth Year Department Project Prize
Achievements:
Manchester, UK
2021-Present
Degree: PhD Electrical and Electronic Engineering